與時俱進,誠贏客戶
冠航機械七年堅持專注于建筑工程起重機械設備制造與銷售服務
全國服務熱線0571-88566309

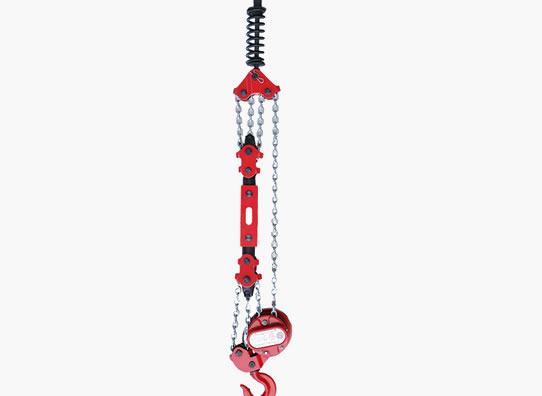
現代建筑作業施工中,爬架隨處可見,可以體型大的爬架是如何從地面上一點點上升到頂部的呢?以前人們僅僅需要爬架電動葫蘆提升爬架,但是容易出現吊裝高度不一致的情況,如今有了智能控制系統,在這種系統的控制,我們可以掌握和控制爬架葫蘆的一舉一動。
智能控制系統采用了先進的單片機可編程序控制技術,可以依靠傳感器測控技術等智能科技對爬架的整個升降過程進行實時監測、自動控制和及時預警和排障。除具有預緊、提升、下降、停止等常規操作功能外還設置有相序保護、停電保護、超載保護、失載保護、自檢測異常警示和停機保護、運行時間限制保護、極限保護等多形式、多重的保護功能;并通過主控箱和手持終端可直觀看見各機位運行狀態,提高了整個電路系統的精確度和安全性。
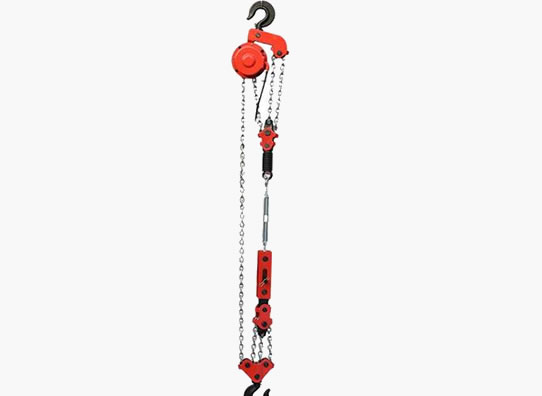
重要的是智能控制系統可以實現爬架電動葫蘆單控與聯控一鍵切換的功能,運行時有時間、荷載的限值多重保護,節省時間且規避操作人行為不當引發的風險。